
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
į┌éÉČž┼eąąĄ─ÜWų▐ėąŠĆ═©ą┼▓®ė[Ģ■╔ŽŻ¼ ę╗éĆłAŅ^łA─XĄ─╝ę╗’▓╗═ŻĄžū▀ üĒū▀╚źŻ¼▀ģŽ“╚╦éāå¢║“▀ģĮoģóė^š▀Ęų░lČY╬’ĪŻ▀@éĆÖCŲ„╚╦ų╗ėą░ļ├ūĖ▀Ż¼┐┐╦─éĆ▌åūė ▀\äėĪŻ╦³łAłAĄ─┤¾─X┤³╔Žėąā╔éĆ▓Ķ▒Ł┐┌┤¾ąĪĄ─č█Š”Ż¼ķWķWĄž░lų°╦{╣ŌĪŻčbėąąĪą═└ū▀_Ż¼ė├üĒ╠Į£yų▄ć·Ą─ąą╚╦║═╬’¾wĪŻ╦³┐╔ęįūįäėČŃ▒▄šŽĄK╬’Ż¼Å─ę╗éĆš╣┼_ū▀ Ž“┴Ēę╗éĆš╣┼_Ż¼▀@Š═╩Ū¼Fį┌ęŲäėÖCŲ„╚╦╣½╦Šķ_░lĄ─ī¦ė╬ÖCŲ„╚╦ĪŻįōÖCŲ„╚╦čbéõėąŽ╚ ▀MĄ─ėŗ╦ŃÖCšZę¶╠Ä└ĒŽĄĮyŻ¼╦³─▄┬ĀČ«╚╦ųvėóšZŻ¼▓óĖ∙ō■ėŗ╦ŃÖC┤µā”Ą─ą┼Žóū„│÷ŽÓæ¬Ą─ ╗ž┤ĪŻÖCŲ„╚╦¾wā╚Ą─ėŗ╦ŃÖC▀Ć┐╔ęįĖ∙ō■└ū▀_╠Į£yĄĮĄ─öĄō■Ż¼▀xō±ūį╝║Ą─ąąū▀┬ĘŠĆĪŻ ▀@ĘNÖCŲ„╚╦┐╔ęįė├ė┌╔╠ĄĻī¦┘ÅĪó┘e^Ę■äš╝░×ķ├ż╚╦ī¦Ž“Ą╚įSČÓĘĮ├µĄ─Ę■äš╣żū„ĪŻ

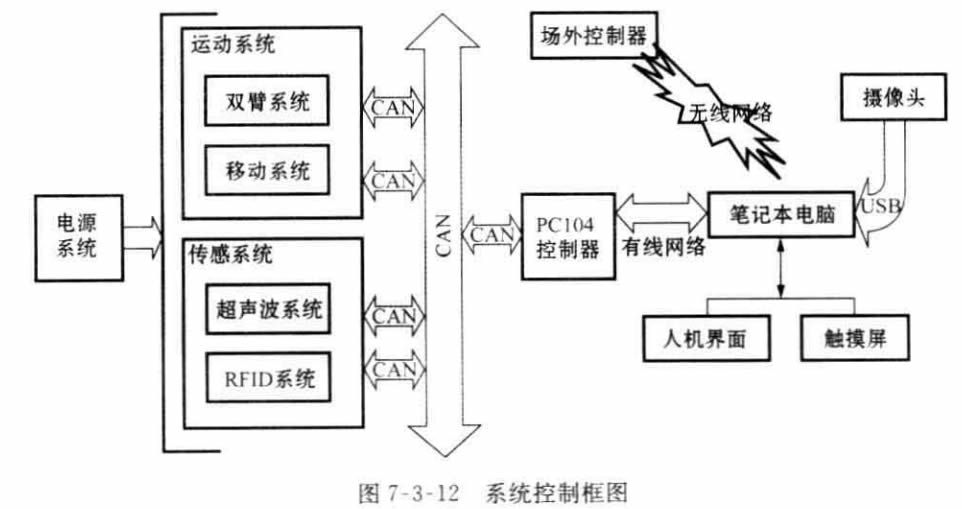
ėŁ┘eĘ■äšÖCŲ„╚╦ŽĄĮyĖ„ė▓╝■─ŻēKų„ę¬ė╔CAN ┐éŠĆ▀BĮėŻ¼═©▀^Įyę╗Ą─CAN ┐é ŠĆģfūhīóĖ„─ŻēK║åå╬Ąž╝ė▌dĄĮŽĄĮyųąĪŻŽĄĮyų„ę¬ė╔ļŖį┤ŽĄĮyĪó▀\äė┐žųŲŽĄĮyĪóé„Ėą ŽĄĮyĄ╚ĮM│╔Ż¼Ųõųą▀\äė┐žųŲŽĄĮy░³└©ļp▒█ŽĄĮy╝░ęŲäėŽĄĮyŻ¼é„ĖąŲ„ŽĄĮy░³└©│¼┬Ģ▓©ŽĄĮyĪóRFIDČ©╬╗ŽĄĮyĪóęĢėXŽĄĮyĮM│╔ĪŻ
Š▀¾wĮYśŗė╔łD7-3-12╦∙╩ŠĪŻ
╩ų▒█Ė„ĻP╣Ø┐žųŲļŖ┬Ę▓╔ė├Ęų▓╝╩Į┐žųŲŽĄĮyŻ¼Ė„ĻP╣Ø┐žųŲŲ„(ų„ MCU ╩Ū TMS320LF2407)ė╔CAN ┐éŠĆŽÓ▀B(CAN2.0-A ░µ▒Š)ĪŻ┐žųŲų▄Ų┌×ķ5m (╝┤╔Ž╬╗ÖC ┼c ╦∙ ėą ĻP ╣Ø ┐ž ųŲ Ų„ ═© ą┼ ę╗ ▒ķ Ż¼ į┘ ╝ė ę╗ Č© įŻ Č╚ ║¾ Ą─ Ģr ķg ) ĪŻ Ė„ ĻP ╣Ø ┐ž ųŲ ļŖ ┬Ę ĮY śŗ ╚ń łD7 - 3 - 13ĪółD7 - 3 - 14╝░łD7 - 3 - 15╦∙╩ŠĪŻ
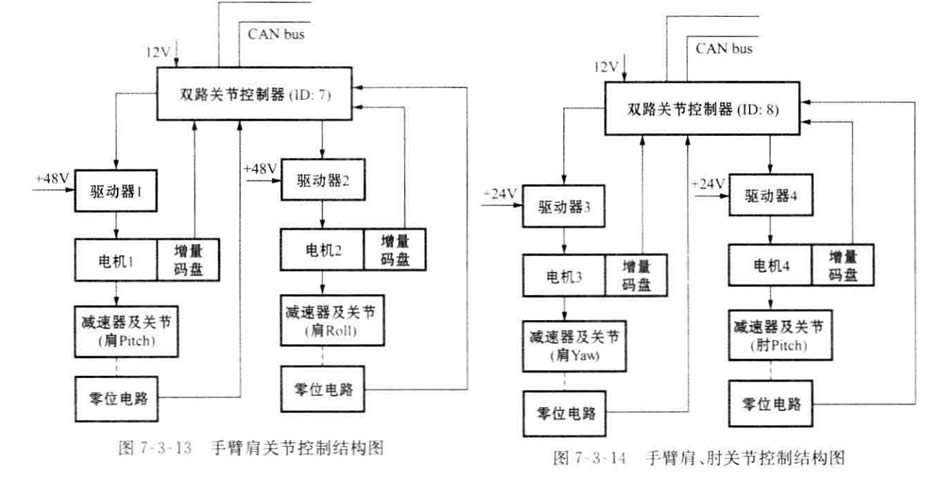
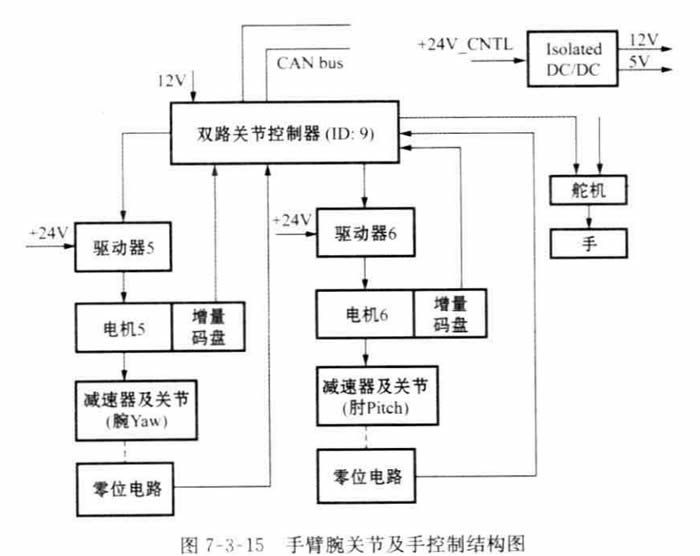
╔Ž╬╗┐žųŲėŗ╦ŃÖC▓╔ė├PC ėŗ╦ŃÖCŻ¼CAN ┐©▀xė├ų▄┴ó╣”Ą─PC104CAN2 ═©ą┼┐©ĪŻ ╝ńPitchĪó╝ń RollĪó╝ń YawĪóųŌPitchĪó═¾ YawĪó═¾Pitch Ė„ĻP╣ØĄ─ųC▓©£p╦┘Ų„£p╦┘▒╚Ęų äe╩Ū100,100.100,100,100,100;ļŖÖC┤a▒P×ķį÷┴┐┤a▒PŻ¼ŠĆöĄ×ķ1000,1000,1000, 1000,1000,1000,ų▒┴„ėą╦óļŖÖC╣”┬╩(RE ŽĄ┴ą)Ęųäe×ķ90W,90W.20W,60W,20W. 20W.
ļp▒█ÖCŲ„╚╦Ė„▀\äė▓┐ĘųŠ∙▀xė├ų▒┴„╦┼Ę■ļŖÖCŻ¼ė├ė┌╔Ē¾wĖ„éĆĻP╣Ø▀\äė║═Ąū▒P ęŲäėĄ─äė┴”Ż¼Ė∙ō■ļp▒█ÖCŲ„╚╦Ą─▀\äė╠ž³cŻ¼┐╔┤¾ų┬īóų▒┴„╦┼Ę■ļŖÖCĄ─▀\ąąĘĮ╩ĮĘų×ķ ā╔ ĘN Ż║
ĪżĄū▒PļŖÖC╣żū„ė┌╦┘Č╚┐žųŲ─Ż╩ĮĪŻ
Īż╔Ž╔ĒĖ„éĆĻP╣ØļŖÖC╣żū„ė┌╬╗ų├┐žųŲ─Ż╩ĮĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |



