
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
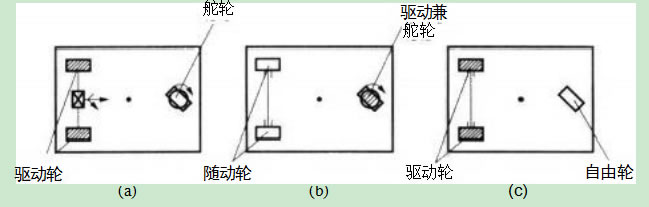
╚¶īó▓┐Ęų╦─▌åÖCśŗųąĄ─ā╔éĆ┬ōäėĄ─ȵ▌åė├ę╗éĆȵ▌å╚ź╠µ┤·Ż¼ätį┌ę╗Č©│╠Č╚╔Ž ┐╔ęį£p╔┘╦─▌åÖCśŗĄ─╚▒³cŻ¼Å─Č°ą╬│╔ī”æ¬śŗą═Ą─╚²▌åą╬╩ĮĪŻłD2- 1-5×ķ│ŻęŖĄ─▓Ņ ╦┘“īäė▐DŽ“ĘĮ╩ĮŻ¼║¾ā╔▌åd┴ó“īäėŻ¼Ū░▌å╩╣ė├─_▌åū„×ķ▌oų·▌åŻ¼▀@ĘNÖCśŗĄ─╠ž³c╩ŪÖCśŗĮM│╔║åå╬ĪóWMR ą²▐D░ļÅĮ┐╔Å─┴ŃĄĮ¤oŽ▐┤¾╚╬ęŌįOČ©ĪŻ▓╔ė├▀@╚²▌åĮYśŗĄ─ÖC Ų„╚╦▐DÅØ▀^│╠ųąą╬│╔Ą─╦┘Č╚╦▓ą─╬╗ė┌║¾ā╔▌å▌Są─▀BŠĆ╔ŽŻ¼╦∙ęį╝┤╩╣ÖCŲ„╚╦ą²▐D░ļ ÅĮ×ķ┴ŃŻ¼ą²▐Dųąą─ę▓┼c▄ć¾wĄ─ųąą─(╚²éĆ▄ć▌åą╬│╔Ą─╚²ĮŪģ^ė“ā╚)▓╗ę╗ų┬ĪŻĄ½╚²▌å ÖCśŗŠ▀ėąę╗éĆ├„’@Ą─ā׳c╩Ū▓╗ąĶę¬īŻķTĄ─æęÆņŽĄĮy╚ź▒Ż│ųĖ„▌å┼cĄž├µĄ─┐╔┐┐Įė ė|Ż¼įOėŗųąų╗ąĶę¬ūóęŌ▄ć¾wųąą─Ą─╬╗ų├║Ž└Ē╝┤┐╔ĪŻ
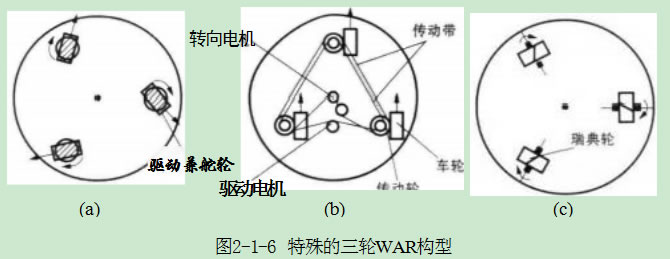
▌å┼õų├ųąę▓ėąę╗ą®║▄╔┘ęŖĄ─┼õų├ĘĮ╩ĮŻ¼╚ńłD2-1-6╦∙╩ŠŻ¼łD2-1-6(a) ųą ╚² éĆ ▌å╗ź│╔120ĪŃĪŻ▄ć▌å▓╗āH┐╔d┴ó“īäėČ°Ūę┐╔ęįd┴ó▐DŽ“Ż╗łD2-1-6(b) ╚²éĆ▄ć▌å▓╔ė├ ═¼▓Į“īäėŽĄĮy┐žųŲŻ¼╚²éĆ▄ć▌å═¼Ģrė├üĒ“īäė┼c▐DŽ“Ż¼▀@ĘNÖCŲ„╚╦ę╗éĆ═╗│÷Ą─╠ž³c╩ŪÖCŲ„╚╦▒Š¾wŽÓī”ė┌Ąž├µĄ─ū╦æB▒Ż│ų▓╗ūāŻ╗łD2-1-6(c) ╗ź│╔120ĪŃ▓╝ų├Ą─╚²éĆ▄ć▌å▓╔ė├╚Ąõ▌åŻ¼═©▀^d┴ó“īäėĖ„▌å┐╔īŹ¼FÖCŲ„╚╦╚½ĘĮ╬╗ęŲäėĪŻ
łD2-1-7╩Ū▓╔ė├łD2-1-6(b) ╦∙╩ŠĄ─═¼▓Į“īäėĄ─╚²▌åęŲäėÖCŲ„╚╦īŹ└²ĪŻ╚²▌å ═¼▓Į“īäėļm╚╗ėą3éĆ“īäė║═▓┘┐v▌åŻ¼┐╔╩Ū┐é╣▓ė├┴╦2éĆļŖÖCĪŻ ę╗éĆŲĮęŲļŖÖC╩╣3 éĆ▌åĄ─╦┘Č╚ę╗ų┬Ż¼ę╗éĆ▓┘┐vļŖÖC╩╣▌åūė└@ų°╦³éāĖ„ūįĄ─┤╣ų▒▓┘┐v▌Sę╗Ųą²▐DĪŻĄ½ ╩ŪąĶųĖ│÷Ą─╩ŪŻ¼▌åūė╩ŪŽÓī”ė┌ÖCŲ„╚╦Ą─Ąū▒P╩▄▓┘┐vĄ─Ż¼ę“┤╦ø]ėąÖCŲ„╚╦Ąū▒Pųžą┬Č© Ž“Ą─ų▒ĮėĘĮĘ©ĪŻį┌ūĘŪ¾╚½Ž“ąįĄ─Ūķør Ž┬Ż¼═¼▓Į“īäė╠žäeėą║├╠ÄŻ¼ų╗ę¬Ė„┤╣ų▒ Ą─▓┘┐v▌S┼cĖ„▌å╠źĄ─Įėė|┬ĘÅĮ┼┼┴ąę╗ ų┬Ż¼ÖCŲ„╚╦Š═┐╔ęįĮø│Żī”Ųõ▌åūėųžą┬Č© Ž“Ż¼▓óčžų°ą┬▄ē█E▀\äėĪŻ«ö╚╗Ż¼═¼▓Į“ī äėę▓ėąę╗Č©Ą─╚▒³cŻ║Ž╚Ż¼ŲĮęŲļŖÖCę╗ ░Ńė├å╬Ė∙é„▌öµ£“īäė3éĆ▌åūėŻ¼ę“×ķ“ī äėµ£ųąĄ──ÓØ{║═Ę┤ø_┤µį┌Ż¼╦∙ęį▓╗šō║╬ĢrŻ¼«ö“īäėļŖÖCŲäėĢrŻ¼ZĮ³Ą─▌åūėį┌ Z▀hĄ─▌åūėų«Ū░ą²▐DŻ¼Å─Č°Ąū▒PĘĮŽ“ėą ąĪąĪĄ─Ė─ūāĪŻ▀B═¼ĖĮ╝ėĄ─ļŖÖC╦┘Č╚Ą─ Ė─ūāŻ¼▀@ą®ąĪĮŪČ╚Ų½ęŲĢ■ųØuĘe└█Ż¼╩╣ łD2-1-7 ═¼▓Į“īäė╚²▌åęŲäėÖCŲ„╚╦ Ą├į┌║Į╬╗£yČ©Ų┌ķg«a╔·┤¾Ą─ĘĮŽ“š`▓ŅĪŻ
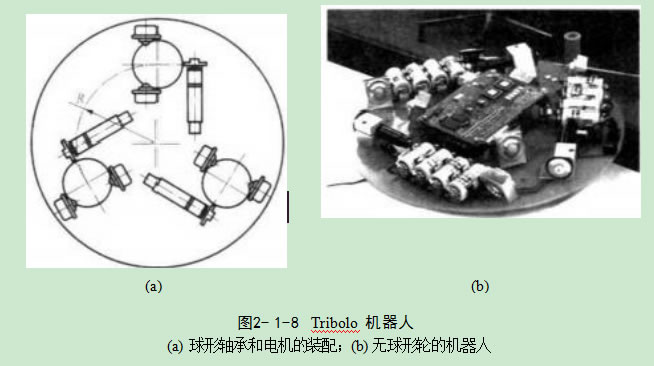
Ųõ┤╬Ż¼ęŲäėÖCŲ„╚╦Ąū▒PĄ─ęŲäėĘĮŽ“¤oų▒Įė┐žųŲŻ¼▌åūė▓╗ī”ĘQĄ─ŪķørĢ■«a╔·Ė„ĘNŅÉą═ Ą─š`▓ŅĪŻ ╚╩┐┬ō░Ņ└Ē╣ż┤¾īWįOėŗĄ─ Tribolo ╩Ū▓╔ė├3éĆŪ“ą╬▌åĄ─╚½Ž““īäėĄ─īŹ└²Ż¼╚ńłD2-1-8(a) ╦∙╩ŠŻ¼3éĆŪ“ą╬▌åĖ„ė╔ę╗éĆļŖÖC╝żäŅŻ¼3éĆĮėė|³cīóŪ“ą╬▌åæęÆņŲüĒŻ¼ Ųõųą2éĆ³cė╔Ū“ą╬▌S│ąĮoČ©Ż¼┴Ēę╗éĆė╔▀BĮėĄĮļŖÖC▌SĄ─▌åūėĮoČ©ĪŻ▀@ĘNįOėŗĄ─ÖC Ų„╚╦ÖCäėąį▒╚▌^║├Ż¼Č°ŪęįOėŗ║åå╬Ż¼Ą½╩Ū╦³ų╗▀mė├ė┌ŲĮ╠╣Ą─┬Ę├µ║═ąĪ┬ĘŻ¼ę¬ųŲįņ─”▓┴ŽĄöĄ┤¾Ą─łAą╬▌åūė╩Ū╩«Ęų└¦ļyĄ─ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


