
Å─ąąśIš¹¾w▒Ē¼FüĒ┐┤, ╚╦ą╬ÖCŲ„╚╦▓ó╬┤ęÄ─Ż╗»╔·«a,Ė„┤¾ģó┼cš▀ęįąĪ┼·┴┐Į╗ĖČĪó“×ūCł÷Š░Īó╝╝ąg│ų└mĄ³┤·×ķų„,▓┐Ęųģó┼cš▀Å─╠žČ©╣”─▄ąĶŪ¾│÷░l▀M ąąķ_░l (╚ń╦čŠ╚ĪóųvĮŌī¦ė[Īó╣żÅS┴Ń▓┐╝■░▓čbĄ╚),ęįīżŪ¾Ī¬Č©│╠Č╚Ą─┬õĄžĪŻ š¹¾wČ°čį,╚╦ą╬ÖCŲ„╚╦«aśI╠Äė┌Å─0ĄĮ1├╚č┐ļAČ╬ĪŻ
╚╦ą╬ÖCŲ„╚╦ĮĄ▒Š╩Ū┤_Č©┌ģä▌,╣®æ¬µ£│╔╩ņ┼cʱ╩ŪīŹ¼FĮĄ▒Šųžųąų«ųą,╬┤üĒ╚╦ą╬ÖCŲ„╚╦«aśI╣®æ¬µ£ę▓Ģ■┌ģŽ“ųŪ─▄╩ųÖC░lš╣,▀_ĄĮ╔·æB│╔╩ņĪóęÄ─Ż┴┐«a Ūę│╔▒Š┐╔┐žĄ─ĀŅæBĪŻ
o ╝░ĄžĘĮš■▓▀ └¹║├
o╚╦╣żųŪ─▄ĪóGŠ½ ╝Ō▓─┴ŽĄ╚╝╝ąg░l š╣“īäė
o┘Y▒Š┤¾┴┐╚┌╚ļ, ī”Ū░Š░┐┤║├,╩ą ł÷š²¤ß,╚┌┘YČÓ ╝»ųąį┌B▌åų«Ū░ĪŻ
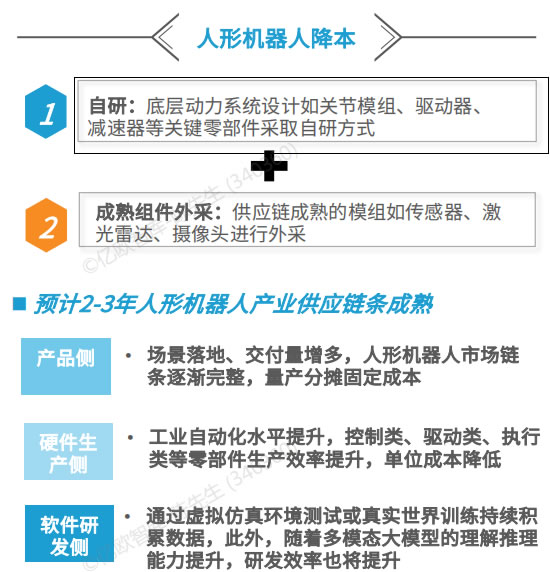
oŲ¾śIĖ„ūįįć“×┐╔ ąąĄ─╔╠śI─Ż╩Į╝░ ╝╝ąg┬ĘÅĮ,╝ėŠo ł÷Š░┬õĄž£yįć
o╚╦ą╬ÖCŲ„╚╦æ¬ ė├┬õĄžį÷ČÓ, ╣”─▄╝░╝╝ągĄ³ ┤·╝ė┐ņ
o╔ńĢ■Įė╩▄Č╚║═ šJ┐╔Č╚╠ß╔²
oą┬▀M╚ļŲ¾śIį÷ ČÓ,ų„ę¬Ų¾śI ╝ėÅŖūį╔Ēį┌╝Ü Ęųł÷Š░æ¬ė├ØB ═Ė┬╩
oą┬▀M╚ļš▀£p╔┘, į÷ķLĘ┼ŠÅ,Ų¾śI ĖéĀÄ╝ėäĪ,╝╝ąg ╝░│╔▒Š┐žųŲ▌^×ķ ┬õ║¾Ą─Ų¾śI┐╔─▄ ▒╗Ų╚═╦│÷╩ął÷
oĖéĀÄ╝ėäĪ═Ųäė╚╦ ą╬ÖCŲ„╚╦«aŲĘ╝ė ╦┘╔²JĪó╝╝ąg╝ė ┐ņĄ³┤·,ārĖ±ĮĄ Ą═
o╚╦ą╬ÖCŲ„╚╦ąąśI▀M ╚ļ│╔╩ņŲ┌,į÷ķLĘ┼ ŠÅ
o«aŲĘ▀_ĄĮś╦£╩╗»╔· «a,╚╦ą╬ÖCŲ„╚╦«a ŲĘ╝░ārĖ±ĘĆČ©
oąąśI▒┌ēŠį÷G,²ł Ņ^Ų¾śI│÷¼F,š╝L ╩ął÷,╚╦ą╬ÖCŲ„╚╦ «aŲĘ╝░ārĖ±ĘĆČ©, Ų¾śIķ_▒┘Ą┌Č■äōą┬ śIäš
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



