
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
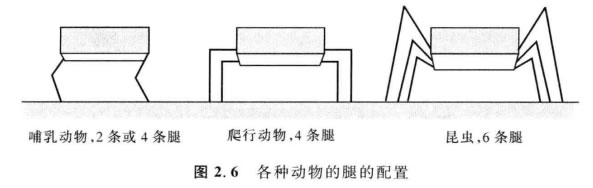
ę“×ķ═╚╩ĮÖCŲ„╚╦Ą─░l├„╩Ū╩▄ĄĮ╔·╬’īW╔ŽĄ─åó░lŻ¼╦∙ęįÖz“×ę╗Ž┬╔·╬’īW╔Ž│╔╣”Ą─ ėą═╚ŽĄĮy╩ŪėąęµĄ─ĪŻįSČÓ▓╗═¼Ą─═╚Ą─śŗįņęčĮøį┌Ė„ĘNĖ„śėĄ─╔·╬’¾wųą│╔╣”Ąž┤µį┌ (łD2.6)ĪŻ┤¾ą═äė╬’Ż¼╚ń▓Ė╚ķäė╬’║═┼└ąąäė╬’ėą4Śl═╚Ż¼Č°└źŽxėą6Śl═╚╗“Ė³ČÓĪŻ─│ ą®▓Ė╚ķäė╬’Ż¼āH┐┐2Śl═╚ąąū▀Ą──▄┴”ęčĮø║▄│÷╔½ĪŻė╚Ųõ╩Ū╚╦ŅÉŻ¼ŲĮ║Ō─▄┴”ęčĮø▀Mš╣ĄĮ ╔§ų┴┐╔ė├å╬═╚▀Mąą╠°▄SĄ─╦«ŲĮó┘ĪŻ▀@ĘN«É│ŻĄ─ÖCäėąį╩Ūęį║▄Ė▀┤·ārĄ├üĒĄ─Ż║×ķ▒Ż│ųŲĮ ║ŌČ°╩╣ė├Ė³Å═ļsĄ─ų„äė┐žųŲ ĪŻ
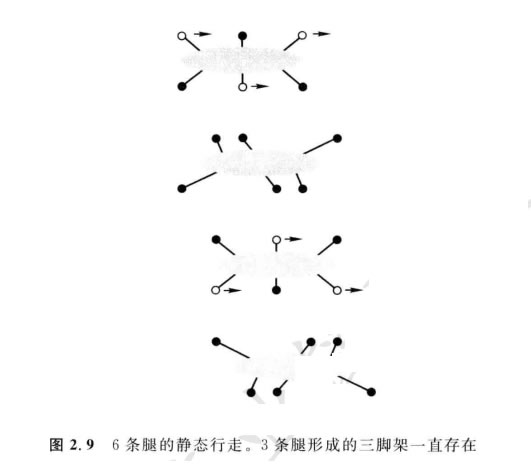
ŽÓĘ┤Ż¼3Śl═╚Ą─äė╬’╝┘Č©╦³─▄▒ŻūCŲõųžą─╠Äį┌Ąž├µĮėė|Ą─╚²─_ģ^ā╚Ż¼╦³Š═─▄ē“š╣ ╩Šņoų╣ĪóĘĆČ©Ą─ū╦æBĪŻ╚ń3Śl═╚Ą─Ą╩ūė╦∙š╣¼F─ŪśėŻ¼ņoų╣ĘĆČ©ąįęŌ╬Čų°▓╗ąĶę¬▀\äėČ° ▒Ż│ųŲĮ║ŌĪŻį┌ø]ėąāAĖ▓┴”ĢrŻ¼╔į╬óŲ½ļxĘĆČ©(▒╚╚ń▌p▌p═ŲĄ╩ūė)Ģ■▒╗äėĄžėĶęįąŻš²Č° ┌ģŽ“ĘĆČ©Ą─ū╦æBĪŻ Ą½╩Ū×ķ┴╦ąąū▀Ż¼ÖCŲ„╚╦ąĶę¬─▄ē“╠¦═╚ĪŻ×ķ┴╦─▄▀_ĄĮņoæBąąū▀Ż¼ÖCŲ„╚╦ų┴╔┘ę¬ėą4 Śl═╚Ż¼ę╗┤╬ęŲäėę╗éĆĪŻČ°ī”ė┌6Śl═╚Ą─ŪķørŻ¼Š═ėą┐╔─▄įOėŗ│÷ę╗ĘN▓ĮæBŻ¼░┤┤╦Ż¼═╚Ą─ņo æBĘĆČ©╚²─_ģ^┐é╩Ū┼cĄž├µĮėė|(łD2.9)ĪŻ
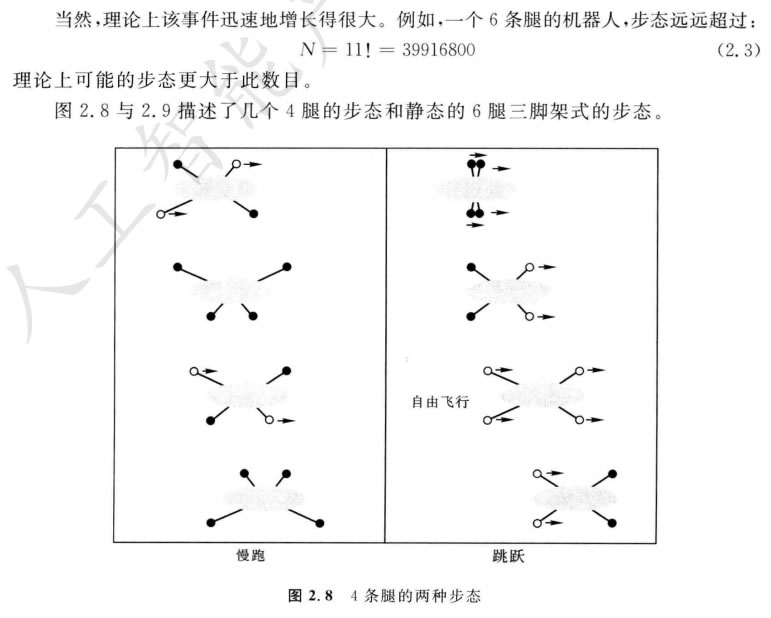
└źŽx║═ų®ųļę╗│÷╔·┴ó╝┤─▄ąąū▀ĪŻī”╦³éāüĒšfŻ¼ąąū▀ĢrĄ─ŲĮ║Ōå¢Ņ}▒╚▌^║åå╬ĪŻ▓Ė ╚ķäė╬’ėą4Śl═╚Ż¼─▄ē“ņoæBąąū▀Ż¼╚╗Č°ė╔ė┌ųžą─Ė▀Ż¼Ģ■▒╚┼└ąąäė╬’ąąū▀ĘĆČ©ąįę¬▓ŅĪŻ └²╚ńŻ¼ėū┬╣į┌╦³éā─▄ąąū▀ų«Ū░ę¬╗©ÄūĘųńŖüĒćLį暊ū▀üĒŻ¼╚╗║¾ėųę¬╗©║├ÄūĘųńŖīW┴Ģąą ū▀Č°▓╗╦żĄ╣ĪŻ╚╦ŅÉėąā╔Śl═╚Ż¼ė╔ė┌╦¹éā─_┤¾Ż¼ę▓┐╔ęįņoæBĄžĘĆČ©šŠ┴óĪŻėūā║ąĶę¬ÄūéĆ į┬▓┼─▄šŠ┴ó║═ąąū▀Ż¼╔§ų┴ąĶę¬Ė³ķLĢrķgüĒīW┴Ģ╠°▄SĪó┼▄▓Į║═å╬═╚šŠ┴óĪŻ
į┌Ė„å╬═╚Ą─Å═ļsąįųąŻ¼ę▓┤µį┌ĘNŅÉĘ▒ČÓĄ─Øō┴”ĪŻį┘š▀Ż¼╔·╬’╩└Įń╠ß╣®┴╦žSĖ╗Ą─╠Ä ė┌ā╔éĆśOČ╦Ą─└²ūėĪŻ└²╚ńŻ¼├½Žx└¹ė├ę║ē║Ż¼═©▀^śŗĮ©¾wŪ╗║═į÷╝ėē║┴”╩╣Ė„═╚╔ņš╣Ż¼Č° Ūę═©▀^ßīĘ┼ę║ē║╩╣Ė„═╚┐vŽ“Ąž╗ž╩šŻ¼╚╗║¾┤╠╝żå╬éĆ┐╔└Ł╔ņĄ─╝Ī╚ŌŻ¼Ā┐ę²═╚┐┐Ž“╔Ē¾wĪŻ Ė„Śl═╚ų╗ėą1éĆūįė╔Č╚Ż¼╦³čžų°═╚┐vŽ“ĄžČ©ĘĮŽ“ĪŻŪ░Ž“▀\äėę└┘ćė┌¾wā╚Ą─ę║ē║Ż¼╦³─▄ ╔ņÅłā╔═╚ķgĄ─ŠÓļxĪŻ╦∙ęįŻ¼├½ŽxĄ─═╚į┌ÖCąĄ╔ŽüĒ┐┤║▄║åå╬Ż¼╝┤└¹ė├Z╔┘öĄ─┐Ą─═Ō▒Ē╝Ī ╚ŌŻ¼═Ļ│╔┴╦Å═ļsĄ─š¹¾w▀\äėĪŻ
į┌┴Ēę╗śOČ╦Ż¼▀B═¼─_ų║Ą─╔Ņīė┤╠╝żŻ¼╚╦═╚ėą7éĆęį╔ŽĄ─ų„ūįė╔Č╚Ż¼15éĆęį╔ŽĄ─╝Ī ╚Ō╚║Ż¼╝żäŅ8éĆÅ═ļsĄ─ĻP╣ØĪŻ
į┌═╚╩ĮęŲäėÖCŲ„╚╦ŪķørŽ┬Ż¼═©│Żę¬Ū¾ų┴╔┘2éĆūįė╔Č╚Ż¼═©▀^╠ßŲ═╚║═īó═╚ö[äėŽ“ Ū░Ż¼╩╣═╚Ž“Ū░▀\äėĪŻĖ³Ųš═©Ą─╩Ūī”Ė³Å═ļsĄ─ęŲäėŻ¼╚ńłD2.6╦∙╩ŠŻ¼ĖĮ╝ė┴╦Ą┌3éĆūįė╔ Č╚ĪŻį┌äōįņā╔ūŃąąū▀ÖCŲ„╚╦ųąŻ¼Zą┬«aŲĘęčį┌§ūĻP╣Ø╠Äį÷╝ė┴╦Ą┌4éĆūįė╔Č╚ĪŻ═©▀^ ┤╠╝ż─_Ąū░ÕĄ─ū╦æBŻ¼ūѧū─▄╩╣ÖCŲ„╚╦ęŲäėĄž├µĮėė|Ą─║Ž│╔┴”Ž“┴┐ĪŻ
┐éų«Ż¼į÷╝ėÖCŲ„╚╦═╚Ą─ūįė╔Č╚╠ßĖ▀┴╦ÖCŲ„╚╦Ą─ÖCäėąįŻ¼╝╚öU┤¾┴╦ÖCŲ„╚╦─▄ąąū▀Ą─ Ąžą╬ĘČć·Ż¼ėųį÷ÅŖ┴╦ÖCŲ„╚╦ęįĖ„ĘN▓ĮæBąąū▀Ą──▄┴”ĪŻ«ö╚╗Ż¼ĖĮ╝ėĻP╣Ø║═╝żäŅŲ„Ą─ų„ę¬╚▒³c╩ŪĦüĒäė┴”Īó┐žųŲ║═┘|┴┐ĘĮ├µĄ─å¢Ņ}ĪŻĖĮ╝ėĄ─╝żäŅŲ„ąĶę¬─▄┴┐║═┐žųŲŻ¼╦³éāę▓░č ┘|┴┐╝ėĄĮ═╚╔ŽŻ¼Å─Č°▀Mę╗▓Įį÷╝ė┴╦ī”¼Fėą╝żäŅŲ„Ą─╣”┬╩║═žō▌dĄ─ę¬Ū¾ĪŻ
ī”ė┌ČÓ═╚ęŲäėÖCŲ„╚╦Ż¼┤µį┌▀\äėĢr═╚Ą─ģfš{╗“▓ĮæB┐žųŲå¢Ņ}ĪŻ┐╔─▄Ą─▓ĮæBöĄ─┐ ę└┘ćė┌═╚Ą─öĄ─┐[52]ĪŻī”å╬Śl═╚Č°čįŻ¼▓ĮæB╩Ū╠¦Ų┼cĘ┼Ž┬╩┬╝■Ą─ą“┴ąĪŻī”ę╗éĆėą k Śl ═╚Ą─ęŲäėÖCŲ„╚╦Ż¼▓ĮąąÖCŲ„┐╔─▄╩┬╝■Ą─┐éöĄN ×ķ
N=(2k-1)! (2.1)
ī”ė┌2Śl═╚Ą─▓ĮąąŲ„Ż¼k=2 ═╚Ż¼┐╔─▄╩┬╝■Ą─┐éöĄN ×ķ
N=(2kĪ¬1)!=3!=3Īż2Īż1=6 (2.2)
6éĆ▓╗═¼╩┬╝■ą“┴ą╚ńŽ┬(╦³éāę▓┐╔ęį▒╗ĮM║Ž│╔Ė³×ķÅ═ļsĄ─ą“┴ą):
1.2═╚Ž┬Ī¬ėęŽ┬/ū¾╔ŽĪ¬2═╚Ž┬Ż╗
2.2═╚Ž┬Ī¬ėę═╚╔Ž/ū¾═╚Ž┬Ī¬2═╚Ž┬Ż╗
3.2═╚Ž┬Ī¬2═╚╔ŽĪ¬2═╚Ž┬Ż╗
4. ėę═╚Ž┬/ū¾═╚╔Ž Ī¬ ėę═╚╔Ž/ū¾═╚Ž┬ę╗ėę═╚Ž┬/ū¾═╚╔ŽŻ╗
5. ėę═╚Ž┬/ū¾═╚╔Ž Ī¬ 2═╚╔Ž Ī¬ ėę═╚Ž┬/ū¾═╚╔ŽŻ╗
6. ėę═╚╔Ž/ū¾═╚Ž┬ Ī¬ 2═╚╔Žę╗ėę═╚╔Ž/ū¾═╚Ž┬ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


