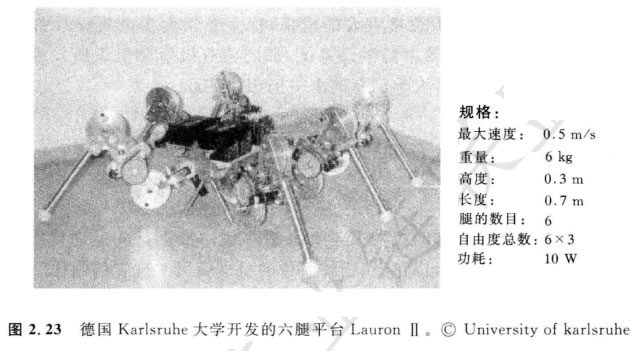
ė╔ė┌ąąū▀Ų┌ķgĄ─ņoæB(t©żi)ĘĆ(w©¦n)Č©ąįŻ¼┴∙═╚ĮYśŗį┌ęŲäėÖCŲ„╚╦īWųąęčĮø(j©®ng)║▄┴„ąą(łD2.23 ║═łD1.3),ę“Č°ĮĄĄ═┴╦┐žųŲĄ─Å═ļsąįĪŻį┌┤¾ČÓöĄ(sh©┤)ŪķørŽ┬Ż¼Ė„Śl═╚ėą3éĆūįė╔Č╚Ż¼░³└©
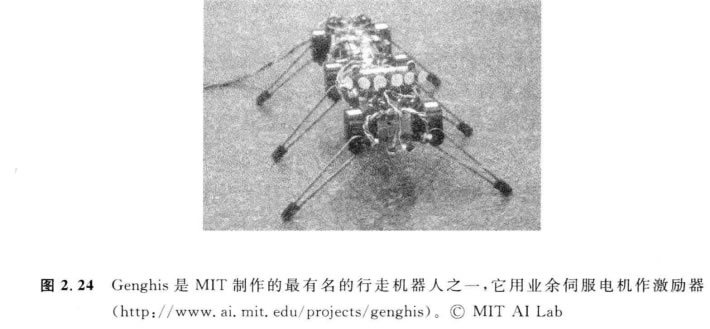
═╬▓┐ÅØŪ·ĪóŽź╔wÅØŪ·║══╬▓┐═Ōš╣(łD2.7)ĪŻGenghis ╩Ūę╗éĆ╔╠śI(y©©)╔Žęč┐╔ė├Ą─ėą6Śl═╚ Ą─śI(y©©)ėÓÖCŲ„╚╦Ż¼Ė„═╚ėąśI(y©©)ėÓ╦┼Ę■ļŖÖC╦∙╠ß╣®Ą─2éĆūįė╔Č╚(łD2.24)ĪŻ▀@śėĄ─ÖCŲ„╚╦ āHė╔═╬▓┐ÅØŪ·║══╬▓┐═Ōš╣ĮM│╔Ż¼į┌┤ų▓┌Ą─Ąžą╬ųąÖCäėąį▌^▓ŅŻ¼Ą½į┌ŲĮĄž╔Žät▒Ē¼F(xi©żn)║▄ ║├ĪŻę“×ķ╦³╩Ūė╔ų▒═╚║═╦┼Ę■ļŖÖC║åĮ▌čb┼õČ°│╔Ż¼╦∙ęįÖCŲ„╚╦śI(y©©)ėÓÉ█║├š▀┐╔ęį║▄╚▌ęū ĄžųŲū„▀@ĘNÖCŲ„╚╦ĪŻ
└źŽx▒╗ūC├„╩ŪĄžŪ“╔ŽZ│╔╣”Ą─▀\äė╔·╬’ĪŻ╦³éā╔├ķLė┌ė├┴∙═╚┤®įĮ╦∙ėąą╬╩ĮĄ─Ąž ą╬Ż¼╔§ų┴┐╔ęįĄ╣ų°ąąū▀ĪŻ─┐Ū░Ż¼╚╦įņ┴∙═╚ÖCŲ„╚╦┼c┴∙═╚└źŽxų«ķgĄ─╣”─▄▓ŅŠÓ╚į╚╗║▄ ┤¾ĪŻėą╚żĄ─╩ŪŻ¼▀@▓ó▓╗ė╔ė┌ÖCŲ„╚╦╚▒Ę”ūŃē“öĄ(sh©┤)─┐Ą─ūįė╔Č╚Ż¼Č°╩Ūę“×ķ└źŽx░č×ķöĄ(sh©┤)▓╗ČÓ
Ą─ų„äėūįė╔Č╚┼c¤oį┤ĮYśŗĮY║ŽŲüĒĪŻŠw╚ń╝Ü╬óĄ╣├½║═┘|(zh©¼)Ąž┤ų▓┌Ą─╚Ōų║Ż¼śO┤¾Ąžį÷ÅŖ ┴╦Ė„═╚Ą─ūź┴”ĪŻÖCŲ„╚╦īWī”▀@ĘN¤oį┤─®Č╦ĮYśŗĄ─╔Ņ╚ļ蹊┐▓┼äéäéķ_╩╝ĪŻ└²╚ńŻ¼ėąę╗ éĆ蹊┐ąĪĮMš²į┌įćłDį┘įņ¾»“ļ═╚Ą─═Ļš¹Ą─ÖCąĄ╣”─▄[124]ĪŻ
Å─╔Ž╩÷└²ūė┐╔ęį├„░ūŻ¼═╚╩ĮÖCŲ„╚╦┼cŲõ╔·╬’═¼ŅÉ┐╔Ųźö│ų«Ū░▀ĆėąįSČÓĄžĘĮąĶę¬ Ė─▀MĪŻ▓╗▀^Ż¼ę¬ZĮ³ęč╚ĪĄ├┴╦ęŌ┴xųž┤¾Ą─│╔╣¹Ż¼▀@ų„ę¬╩Ūė╔ė┌ļŖÖCįOėŗĘĮ├µėą╦∙▀M š╣ĪŻäō(chu©żng)įņę╗éĆŠ▀ėąäė╬’╝Ī╚Ōą¦┬╩Ą─╝żäŅŽĄĮy(t©»ng)Ż¼╚ń═¼ė├ėąÖC╔·├³ĮM┐Ś╦∙░l(f©Ī)¼F(xi©żn)Ą──▄┴┐├▄ Č╚▀Mąą─▄┴┐┤µā”ę╗śėŻ¼ļxÖCŲ„╚╦īWęčėąĄ─╦«ŲĮ╚įŽÓŠÓ╔§▀hĪŻ
╦─═╚ÖCŲ„╚╦į┌╚╦ÖCĮ╗╗źčąŠ┐ųą,Š▀ėą«öū„ėąą¦╚╦įņ«a(ch©Żn)ŲĘĄ─Øō─▄,─▄ē“ū▀Īó┼▄Īó┼└Ż¼▓ó▀\▌dųžžō║╔,LittleDog╩Ūę╗éĆąĪ│▀┤ńĄ─ÖCŲ„╚╦,▀@éĆÖCŲ„╚╦į┌┼└ąą║═äėæB(t©żi)▀\äė▓ĮæB(t©żi)ĘĮ├µŻ¼Š▀ėąūŃē“ÅŖĄ─╣”─▄
Ė▀▌Ś╔õ─═╩▄ąį┤_▒ŻÖCŲ„╚╦į┌É║┴ėŁh(hu©ón)Š│ųąļŖūėŽĄĮy(t©»ng)š²│Ż▀\ū„;▀\äė┐žųŲ─▄┴”▀m┼õÅ═ļs╚╬äš┼cł÷Š░;ūįų„ī¦║ĮČ©╬╗─▄ē“Ū╔├ŅĄž└¹ė├┐šķg,į┌¬MšŁ═©Ą└║═įOéõķgŽČķg£╩┤_┤®╦¾
╚╦ą╬ÖCŲ„╚╦ėą═¹│╔×ķ║╦ļŖ╚½«a(ch©Żn)śI(y©©)µ£ųŪ─▄╗»Ą─║╦ą─ų¦ō╬,×ķ║╦ļŖųŪ─▄╗»░l(f©Ī)š╣ķ_åóą┬Ų¬š┬;═Ļ│╔ė¢ŠÜöĄ(sh©┤)ō■(j©┤)▓╔╝»ŽĄĮy(t©»ng)║═╣ż╦ćūįų„╗»īŹ¼F(xi©żn)Ą─ļAČ╬ąį“×╩šŻ¼ś╦ųŠų°╚╦ą╬ÖCŲ„╚╦į┌║╦ļŖąąśI(y©©)æ¬ė├▀~Ž“ųžę¬ļAČ╬
╚╦ą╬ÖCŲ„╚╦ū„×ķŠ▀╔ĒųŪ─▄Ą─Ąõą═▌d¾w,╣żū„æ¬ė├ł÷Š░žSĖ╗; ī”ūįų„ąį┼cäėæB(t©żi)øQ▓▀─▄┴”Ą─Ė▓╔w▓╗ūŃ;äėæB(t©żi)┼cĘŪĮYśŗ╗»Łh(hu©ón)Š│Ą─▀mæ¬ąį;ČÓ─ŻæB(t©żi)Į╗╗źĄ─Å═ļsąį┐╔─▄«a(ch©Żn)╔·Å═║Ž’LļU
ÖCŲ„╚╦ÖCąĄ░▓╚½╩ŪųĖ═©▀^ÖCąĄĮYśŗįOėŗ┤_▒ŻÖCŲ„╚╦į┌▀\ąą▀^│╠ųą▒▄├Ōę“ÖCąĄ╣╩šŽ;ļŖÜŌ░▓╚½▒▄├Ōę“ļŖÜŌ╣╩šŽę²░l(f©Ī)ė|ļŖ;╣”─▄░▓╚½┤_▒Ż╚╦ą╬ÖCŲ„╚╦į┌Ųõ╣”─▄ł╠(zh©¬)ąą▀^│╠ųą▒▄├Ōī”╚╦åTĪó Łh(hu©ón)Š│╗“ūį╔Ēįņ│╔é¹║”
┤¾ąĪ─XųŪ─▄æ¬Ė▓╔wĖąų¬ĪóšJų¬ĪóøQ▓▀┼cł╠(zh©¬)ąąĄ─═Ļš¹µ£┬Ę,×ķŽ┬īėų½╝Ī¾wŽĄĮy(t©»ng)╠ß╣®▓▀┬įųĖī¦┼c┐žųŲą┼╠¢ų¦│ų;ų½╝Ī¾w▀\äėĮYśŗ╝»│╔Īó┐žųŲ╦ŃĘ©┼cĖąų¬Ę┤üŽĄĮy(t©»ng)Ą─╚┌║Ž│╠Č╚
ųŪ─▄-įu╣└┤¾ąĪ─XųŪ─▄Īóų½╝Ī¾w▀\äėĄ╚─▄┴”Ą─╦«ŲĮ;┐╔┐┐-┐╝▓ņÖCŲ„╚╦į┌ē█├³ĪóŲĮŠ∙¤o╣╩šŽĢrķgęį╝░Łh(hu©ón)Š│▀mæ¬ąį;┐╔ą┼-║Ł╔wöĄ(sh©┤)ō■(j©┤)┐╔ą┼Īó╦ŃĘ©┐╔ą┼ęį╝░ąą×ķ┐╔ą┼
╚½Ū“ļŖūėŲż─w╩ął÷2024─Ļ╝s63ā|├└į¬Ż¼ŅAėŗ2034─Ļ│¼300ā|├└į¬Ż©CAGR 17%Ż®;─ŻöM╚╦ŅÉŲż─wĄ─ė|ėXĪó£žČ╚ĪóرČ╚Ėąų¬Ż¼╠ß╔²ÖCŲ„╚╦Ę┬╔·─▄┴”┼cĮ╗╗ź¾w“×
īŻė├ÖCŲ„╚╦╩Ū3ūįė╔Č╚/Ū¦ŲĮĘĮ├ū;├µŽ“╬’ŲĘ▀\▌ö,Ąž├µ ŪÕØŹĄ╚å╬ę╗╚╬äš;ŅÉ╚╦ą╬ÖCŲ„╚╦╩Ū300ūįė╔Č╚/Ū¦ŲĮĘĮ├ū;╚╦ą╬ÖCŲ„╚╦╩Ū30000ūįė╔Č╚/Ū¦ŲĮĘĮ├ū,ī”╚╦ÖCĮ╗╗ź¾w“×ę¬Ū¾▌^Ė▀Ą─ ł÷Š░
ÖCŲ„╚╦ūįäė╗»×ķ╠ß╔²ĮM╝■┤“─ź╣ż╦ćĄ─ą¦┬╩║═│╔▒Šą¦ęµ╠ß╣®┴╦Š▐┤¾Ą─Øō┴”,ÖCŲ„╚╦ūįäė╗»×ķ═ŲäėļŖūėųŲįņśI(y©©)Ą─ĖéĀÄ┴”║═│╔╣”╠ß╣®┴╦ę╗ĘNęčĮø(j©®ng)“×ūCĄ─ĮŌøQĘĮ░Ė
AI Agent ╩ŪĮ╗╗źĄ─▌d¾w║═╚ļ┐┌,īó╝»│╔,Įy(t©»ng)ę╗Ė„ŅÉ APP Ą─╚ļ┐┌,│╔×ķ▓┘ū„ŽĄĮy(t©»ng)╝ēäeĄ─│¼╝ēAPP,╚╦ÖCĮ╗╗źūāĖ’ĦüĒą┬╔╠śI(y©©)─Ż╩Į,ČÓ─ŻæB(t©żi)▌ö╚ļĪóūį╚╗šZčįĮ╗╗źīó┤¾┤¾ĮĄĄ═▄ø╝■æ¬ė├ķTÖæ
╣▓Ęų×ķ 7éĆ▓┐Ęų,╩ūŽ╚├„┤_┴╦╣żśI(y©©)ÖCŲ„╚╦Ą─Įy(t©»ng)ėŗĘČć·,▓óÅ─╣żśI(y©©)ÖCŲ„╚╦ĘųŅÉś╦£╩,ųąć°╣żśI(y©©)ÖCŲ„╚╦╩ął÷░l(f©Ī)š╣Üv│╠╝░š■▓▀Ęų╬÷,╩ął÷ęÄ(gu©®)─Ż,ĖéĀÄĖ±Šų,╔Žė╬║╦ą─┴Ń▓┐╝■,ęį╝░Ž┬ė╬Ąõą═æ¬ė├ąąśI(y©©)Ą╚┴∙┤¾ā╚(n©©i)╚▌




