
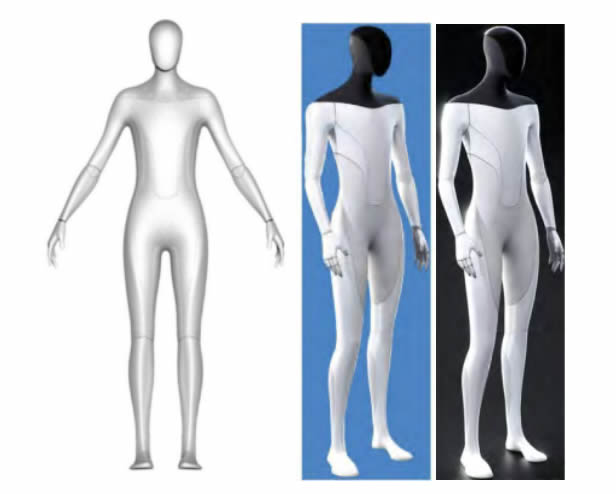
Optimus/Ūµ╠ņų∙Ż║╚╦ą╬ÖCŲ„╚╦ Optimus ė┌ 2022 ─Ļ╠ž╦╣└Ł AI Day ųą┴┴ŽÓŻ¼│╔×ķ éĆ═Ļ╚½ę└┐┐ AI ╦ŃĘ©Īóūį╔ĒļŖ│žļŖ┐ž║═G╝»│╔ļŖ“īł╠ąąŲ„“īäėĄ─╚╦ą╬ÖCŲ„╚╦ĪŻ ė▓╝■ĘĮ├µŻ¼Ī░Ūµ╠ņų∙Ī▒╔ĒG 172cmŻ¼š¹¾wųž┴┐ 73kgŻ╗ąąū▀╣”┬╩ 500WŻ¼ū°Ž┬╣”┬╩ 100WŻ¼ š¹¾wģóöĄ┼c 2021 ─ĻĖ┼─ŅÖC┬įėą│÷╚ļĪŻļŖÖC“īäė╔ŽŻ¼Ī░Ūµ╠ņų∙Ī▒ōĒėą 2.3KWHĪó52V ļŖē║Ą─ļŖ│žĮMŻ¼ā╚ų├ļŖūėļŖŲ„į¬╝■Ą─ę╗¾wå╬╬╗Ż╗▀xė├ 28 éĆČ©ųŲĻP╣Ø“īäėŲ„Ż¼Å═ė├ Ų¹▄ćäė┴”┐é│╔įOėŗĮøąąśI╔ŅČ╚įOėŗ 6 ĘNĻP╣Ø“īäėŲ„Ż¼░³└© 3 ĘN▓╗═¼ęÄĖ±Ą─ȵÖC║═ 3 ĘN▓╗═¼ęÄĖ±Ą─ų▒ŠĆł╠ąąŲ„ĪŻĪ░Ūµ╠ņų∙Ī▒╚½╔Ē╝s 50 éĆūįė╔Č╚Ż¼ÖCŲ„╚╦å╬╩ųŠ▀ėą 6 éĆ ł╠ąąŲ„Ż¼11 éĆūįė╔Č╚Ż¼į┌ī”╔·─┤ųĖ┼cĮī┘╝ĪļņĄ─┼õ║ŽŽ┬Ż¼Ī░Ūµ╠ņų∙Ī▒─▄ē“═Ļ│╔ī” ▓╗═¼ųž┴┐║═┤¾ąĪĄ─╬’╝■Ą─ūź╬šŻ¼ŽźĻP╣Øśŗįņ│╔╦─▀B═ŲŚUĮYśŗĪŻ╠ž╦╣└Ł▓╔ė├┼c Autopilot ŽÓ═¼Ą─╦ŃĘ©┐“╝▄Ż¼═©▀^ūįäėś╦ūóŻ©Auto LabelingŻ®ĪóĘ┬šµ(Simulation) ║═öĄō■ę²ŪµŻ©Data EngineŻ®ą╬│╔ė¢ŠÜöĄō■ė├ęįė¢ŠÜĪ░Ūµ╠ņų∙Ī▒Ą─╔±ĮøŠWĮjĪŻĪ░Ūµ╠ņų∙Ī▒Ą─┤¾─X╬╗ė┌▄|Ė╔Ż¼┤Ņ▌d╠ž╦╣└Łūį蹥─ DOJO D1 │¼Jėŗ╦ŃÖCąŠŲ¼Ż¼D1 ąŠŲ¼▓╔ ė├ 7 ╝{├ūųŲįņ╣ż╦ćŻ¼╠Ä└Ē─▄┴”×ķ├┐├ļ 1024 ā|┤╬ĪŻ
Ż©1Ż®īŻ└¹╔ĻšłĖ┼ør
╠ž╦╣└Łį┌ 2022 ─Ļķ_╩╝į┌╚╦ą╬ÖCŲ„╚╦Lė“╔ĻšłīŻ└¹Ż¼Ūęų╗╔Ļšł═Ōė^ įOėŗīŻ└¹Ż©╣▓ 5 ╝■Ż®ĪŻ
╠ž╦╣└ŁĄ─═Ōė^īŻ└¹╚½▓┐ėąą¦Ż¼Ūęų„ę¬╝»ųąį┌╚š▒ŠŻ©4 ╝■Ż®║═ÜWų▐Ż©1 ╝■Ż®ĪŻ
╠ž╦╣└Łį┌ 2022 ─Ļ▓┼ķ_╩╝į┌╚╦ą╬ÖCŲ„╚╦╝╝ągLė“╔ĻšłīŻ└¹Ż¼─┐Ū░ų╗ į┌ A7 Ųõ╦¹ĮYśŗŻ©š¹¾wĮYśŗŻ®╝╝ągĘųų¦╔Ļšłėą 5 ╝■═Ōė^įOėŗīŻ└¹ĪŻ
╠ž╦╣└Ł╚╦ą╬ÖCŲ„╚╦«aŲĘų„ꬊ▀éõļŖ│žĮMŻ©╔µ╝░ D1 ─▄į┤ŽĄĮyŻ®ĪóĻP╣Ø“īäėŲ„Ż©╔µ ╝░ A6 ĻP╣ØŻ®ĪóȵÖCĪóų▒ŠĆł╠ąąŲ„Ą╚äė┴”ĮM╝■Ż©╔µ╝░ D2 äė┴”ŽĄĮyŻ®Ż¼┤╦═Ō▀ĆŠ▀ėą Occupancy Network šŽĄK╬’Öz£y║═╬’¾w▀\äė╣└ėŗŽĄĮyŻ¼ęį FSD ╦ŃĘ©×ķ║╦ą─Ą─╔±ĮøŠW Įjėŗ╦ŃÖCęĢėX╝╝ągŻ©╔µ╝░ C1 ÖCŲ„ęĢėXŻ®ĪŻī”ė┌«öŪ░īŻ└¹▓╝ŠųöĄ┴┐▌^╔┘Ą─ŪķørŻ©āH5 ╝■╔Ļšłė┌ 2022 ─ĻĄ─═Ōė^įOėŗīŻ└¹Ż®Ż¼┐╝æ]ĄĮīŻ└¹ūį╔Ļšł╚šŲ═Ē 18 éĆį┬╣½ķ_Ą─ ęÄČ©Ż¼Ųõ╦¹ęč╔ĻšłĄ─ĘĮĘ©ŅÉĪóĮYśŗŅÉīŻ└¹┐╔─▄╔ą╬┤╣½ķ_ĪŻ
╠ž╦╣└Łį┌╚╦ą╬ÖCŲ„╚╦╝╝ągLė“╔ĻšłĄ─īŻ└¹Š∙×ķ═Ōė^īŻ└¹Ż¼Ųõ═Ōė^īŻ└¹╚ńŽ┬Ż║
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



