
| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ÖCŲ„╚╦ķ_░l(f©Ī)ŲĮ┼_ĻP(gu©Īn)µIĄ─ā╔éĆ▓┐ĘųŠ═╩ŪŻ║▌åūė║═ÖC╝▄Ą─śŗ(g©░u)ą═ĪŻ
ÖCŲ„╚╦ķ_░l(f©Ī)ŲĮ┼_│ŻęŖ8ĘNśŗ(g©░u)ą═.Ż©aŻ®ā╔▌å▓Ņ╦┘“ī(q©▒)äėÖCŲ„╚╦Ż¼Ż©bŻ®car-like robotŻ¼Ż©cŻ®╦─▌å“ī(q©▒)äėÖCŲ„╚╦Ż¼Ż©dŻ®┬─Ħ╩ĮÖCŲ„╚╦Ż¼Ż©eŻ®¹£▌å╚½Ž“ŲĮ┼_Ż¼Ż©fŻ®╚½Ž“▌å╚½Ž“ŲĮ┼_Ż¼Ż©gŻ®╦─“ī(q©▒)╦─▐D(zhu©Żn)ÖCŲ„╚╦Ż¼Ż©hŻ®╦─“ī(q©▒)«Éśŗ(g©░u)ÖCŲ„╚╦.
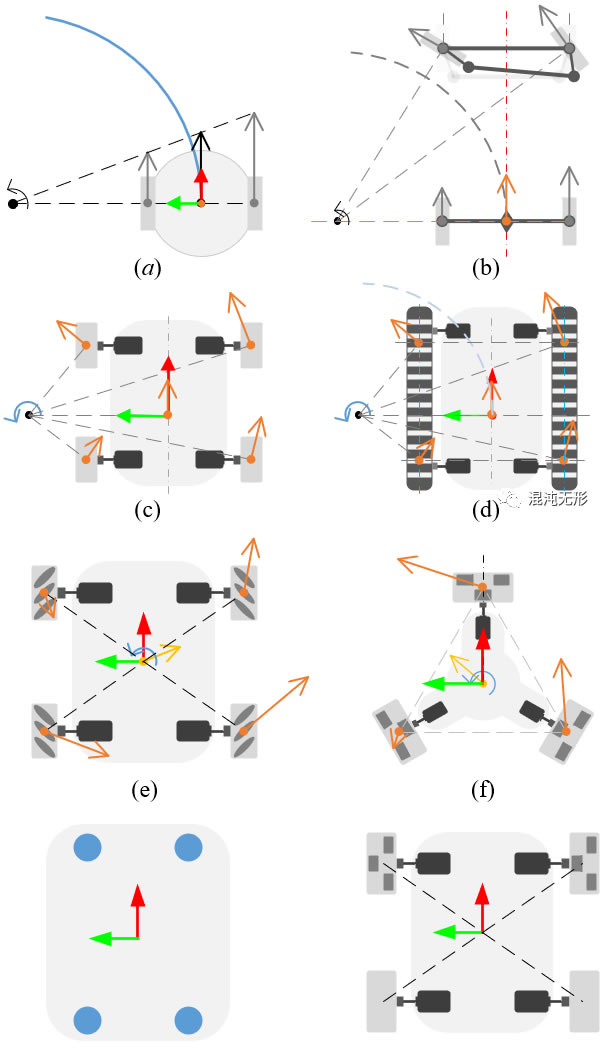
▀@╦─ŅÉÖCŲ„╚╦ī┘ė┌ĘŪ╚½Ž“ęŲäėÖCŲ„╚╦Ż¼ęŌ╬Čų°į┌ŲĮ├µ╔Ž▀\äėāHėą2éĆūįė╔Č╚Ż¼Ųõ▀\äė─Żą═Ą─ŽÓ╦ŲČ╚ę▓▌^GŻ©┐╔ģó┐╝ĪČ│ŻęŖęŲäėÖCŲ„╚╦▀\äėīW─Żą═ĪĘŻ®ĪŻ
▀@ā╔ŅÉŽÓī”╠ž╩ŌŻ¼▓╔ė├┴╦¹£▌å/╚½Ž“▌åŻ¼░┤ššę╗Č©ęÄ(gu©®)┬╔┐žųŲ▌åūė▐D(zhu©Żn)äėŻ¼ät┐╔ęįīŹ¼F(xi©żn)╚½Ž“ęŲäėŻ¼▒╚Ų╔Ž╩÷ĘŪ╚½Ž“ęŲäėÖCŲ„╚╦Ą─ņ`╗ŅąįĖ³║├Ż¼─▄ē“į┌¬MšŁĄ─ģ^(q©▒)ė“▀\äėŻ©┐╔ģó┐╝ĪČ│ŻęŖęŲäėÖCŲ„╚╦▀\äėīW─Żą═ĪĘŻ®ĪŻ
łD 2.3Ż©gŻ®ųąĄ─╦─éĆ╦{╔½įŁ³c▒Ē╩ŠČµ▌åĄ─╬╗ų├Ż¼╔Ž╩÷šäĄĮ├┐éĆȵ▌åėąā╔éĆļŖÖCŻ¼Ęųäe┐žųŲ▌åūėØLäė║═▐D(zhu©Żn)Ž“Ż¼ę“┤╦▀@ĘNŅÉą═Ą─ÖCŲ„╚╦ę▓▒╗ĘQ×ķ╦─“ī(q©▒)╦─▐D(zhu©Żn)ęŲäėÖCŲ„╚╦ĪŻ
╦─“ī(q©▒)╦─▐D(zhu©Żn)ÖCŲ„╚╦ŽÓ«öė┌ėą8éĆļŖÖCį┌┐žųŲŲõ▀\äėŻ¼ę“┤╦┐╔▌p╦╔īŹ¼F(xi©żn)ÖCŲ„╚╦Ą─╚½Ž“▀\äėĪŻŽÓ▌^ė┌¹£▌å/╚½Ž“▌å╚½Ž“ŲĮ┼_Ż¼Čµ▌å╩Ūø]ėą▌üūėĄ─Ż¼ę“┤╦žō▌d─▄┴”Ė³ÅŖŻ¼▌åūė─═─źąįĖ³║├Ż¼Ūę╩ę═ŌĘŪĮY(ji©”)śŗ(g©░u)╗»ł÷Š░Ą─▀mæ¬(y©®ng)─▄┴”Ė³ÅŖĪŻ
«ö╚╗Ż¼ę▓┐╔ęįīó╦─“ī(q©▒)╦─▐D(zhu©Żn)ęŲäėÖCŲ„╚╦Ą──│ę╗ī”ĮŪŠĆ╔ŽĄ─ę╗ī”▌åūėĖ³ōQ×ķ▒╗äė╚fŽ“▌åŻ¼═©▀^┴Ēę╗ī”ĮŪŠĆ╔ŽĄ─ę╗ī”ȵ▌å“ī(q©▒)äė▀\äėŻ¼▀@śėŠ═╩ĪĄ¶4éĆļŖÖCŻ¼ę▓─▄▀_ĄĮ╚½Ž“▀\äėĄ─ą¦╣¹Ż¼ų╗╩Ū“ī(q©▒)äė╣”┬╩ŽÓī”ĮĄĄ═┴╦Ż¼│╔▒Šę▓Š═ĮĄĄ═┴╦ĪŻ
╦─“ī(q©▒)«Éśŗ(g©░u)ÖCŲ„╚╦Ż©▀@╩Ū╣Pš▀öMČ©Ą─├¹ūųŻ®Ą─ā╔Ū░▌å▓╔ė├╚½Ž“▌åŻ¼ā╔║¾▌å▓╔ė├Ųš═©Ž─z▌åŻ¼▀@ĘNśŗ(g©░u)ą═╩Ūų«Ū░į┌╬─½IķåūxĢr║“┼╝╚╗┐┤ĄĮĄ─Ż¼▒╚▌^ą┬ĘfĪŻ
į┌ĪČ╦─▌å“ī(q©▒)äėŻ©SSMRŻ®ęŲäėÖCŲ„╚╦▀\äė─Żą═╝░æ¬(y©®ng)ė├Ęų╬÷ĪĘę╗╬─ųąŻ¼╬ęéāĘų╬÷ā╔ū¾Ż©ė꯮é╚(c©©)▌åĄ─▌å╦┘ąĶę¬▒Ż│ųę╗ų┬Ż¼▀@śė▓┼─▄£p╔┘ÖMŽ“╗¼ęŲĦüĒĄ─▌å╠ź─źōpŻ¼Č°╦─“ī(q©▒)«Éśŗ(g©░u)ÖCŲ„╚╦ät┐╔ęįŽ¹│²▀@ĘNå¢Ņ}ĪŻ
ė╔ė┌ā╔Ū░▌å╩Ū▓╔ė├Ą─╚½Ž“▌åŻ¼«ö╦─“ī(q©▒)«Éśŗ(g©░u)ÖCŲ„╚╦▐D(zhu©Żn)Ž“ĢrŻ¼ā╔Ū░▌åĄ─▌üūėĢ■▒╗äėØLäėŻ¼Å─Č°īó╗¼äė─”▓┴▐D(zhu©Żn)╗»×ķØLäė─”▓┴Ż¼┤¾┤¾ĮĄĄ═┴╦─”▓┴ĦüĒĄ─ōp║─ĪŻ
▀@ĘNŅÉą═Ą─ÖCŲ„╚╦▀Ćėąā╔ĘNūā╗»Ż¼Ųõę╗╩Ūā╔éĆŪ░╚½Ž“▌åĪ░╚źĄ¶Ī▒ļŖÖCŻ¼ūā│╔▒╗äė▌åŻ¼«a(ch©Żn)╔·Ą─ą¦╣¹║═Ī░ā╔Ū░▌å×ķ▒╗äė╚fŽ“▌åĪ▒Ą─ĮY(ji©”)śŗ(g©░u)ŽÓ╦ŲŻ¼Ą½╩ŪėąéĆ║├╠Ä╩ŪŻ¼╦─éĆ▌åūėĄ─░ļÅĮ╩ŪŽÓ═¼Ą─Ż¼įĮšŽ─▄┴”▒╚Ī░╩╣ė├▒╗äė╚fŽ“▌åĪ▒Ė³║├Ż╗ŲõČ■╩Ūā╔ū¾Ż©ė꯮é╚(c©©)Ą─ā╔ļŖÖC║ŽČ■×ķę╗Ż¼ę╗é╚(c©©)āH╩╣ė├ę╗éĆļŖÖCŻ¼▓ó╩╣ė├═¼▓ĮĦīóļŖÖCäė┴”é„╦═ĄĮ═¼é╚(c©©)ā╔▌åŻ¼▀@śėŠ═┐╔ęįāH╩╣ė├2éĆļŖÖCŻ¼īŹ¼F(xi©żn)ÖCŲ„╚╦Ą─ų▒ŠĆ╗“łA╗Ī▀\äėĪŻ
 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬(y©®ng)ė├ ųŪ─▄ßt(y©®)»¤ ╬’┬ō(li©ón)ŠW(w©Żng) ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI(y©©) ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l(f©Ī) ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |



